トップページ > 埼玉県ロボティクスネットワーク(埼玉ロボネット) > セミナー・イベント > 開催報告 > 【終了しました】令和5年度第1回埼玉県ロボティクスセミナー~埼玉県ロボティクスネットワーク設立・ロボット産業の展望と開発事例~ > 「令和5年度第1回埼玉県ロボティクスセミナー」レポート
掲載日:2023年10月31日
ここから本文です。
「令和5年度第1回埼玉県ロボティクスセミナー」レポート
以下はSAITAMAロボティクスセンター(仮称)PR用動画等制作業務委託先の株式会社角川アスキー総合研究所による広報記事になります。
2023年7月25日、コルソホールで第1回 埼玉県ロボティクスセミナーが開催されました。このセミナーの動画はオンデマンドでも配信されましたが、会場には150人を超える参加者が集まり、ほぼ満席になっていました。

会場には150人を超える来場者が。注目度の高さが伺える
第1回埼玉県ロボティクスセミナーのプログラムは、2つの基調講演と2件の事例紹介、埼玉県担当者による埼玉県ロボティクスネットワークとSAITAMAロボティクスセンター(仮称)の概要説明、名刺交換会・交流会の6つのセクションから構成されていました。
ロボットフレンドリーな環境構築を国が後押し
最初の基調講演は、「経済産業省が進めるロボット政策 ロボットフレンドリーな環境の実現について」というタイトルで、経済産業省製造産業局ロボット政策室の佐藤大樹氏によって行われました。
経済産業省製造産業局ロボット政策室の佐藤大樹氏
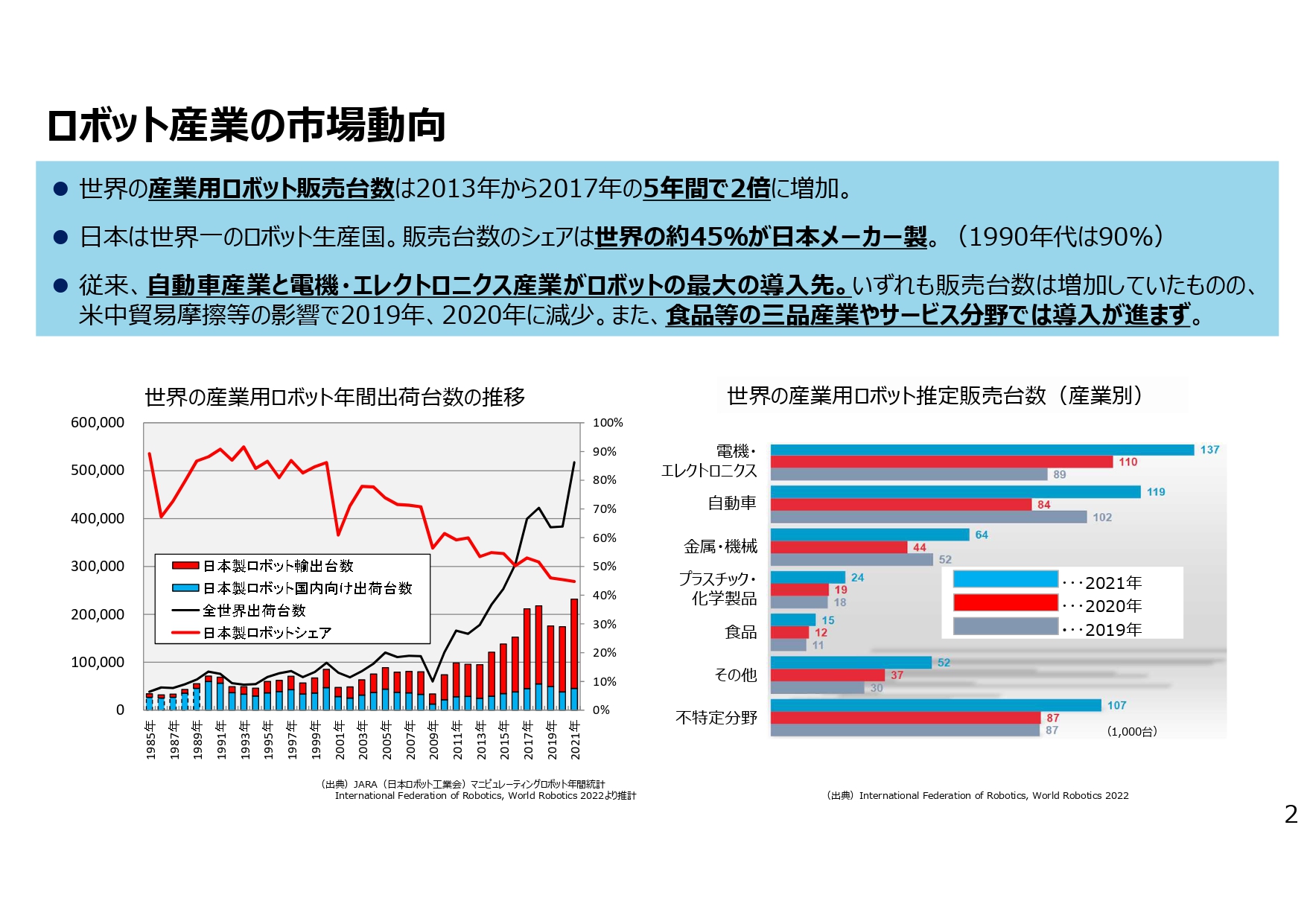
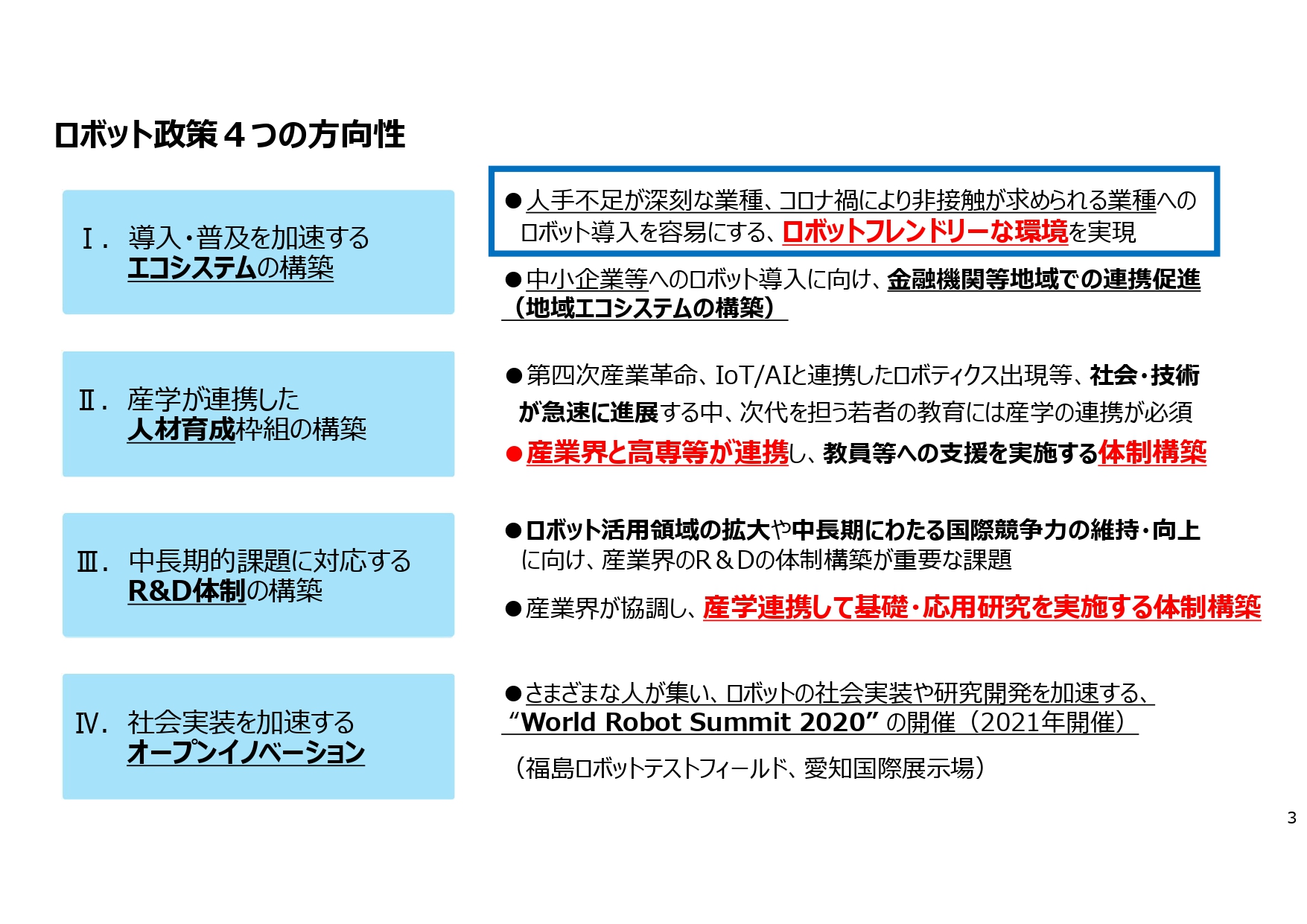
佐藤氏はまず、ロボット産業の市場動向について、日本は世界一の産業用ロボット生産国で、販売台数のシェアは世界の約45%が日本メーカー製ですが、1990年代はシェアが90%だったと説明しました。国のロボット政策には、「導入・普及を加速するエコシステムの構築」「産学が連携した人材育成枠組の構築」「中長期的課題に対応するR&D体制の構築」「社会実装を加速するオープンイノベーション」の4つの方向性があり、未導入領域へのロボット導入普及の課題は、導入の際に個別のユーザー向けのカスタマイズが必要で、高コスト構造になっているためだと指摘しました。このままではロボットの社会実装が限界に達するため、個別の環境に後からロボットを導入させていくのではなく、ユーザーの業務フローや施設環境を、ロボット導入がしやすい”ロボットフレンドリーな環境”に変えることが大切だと語りました。
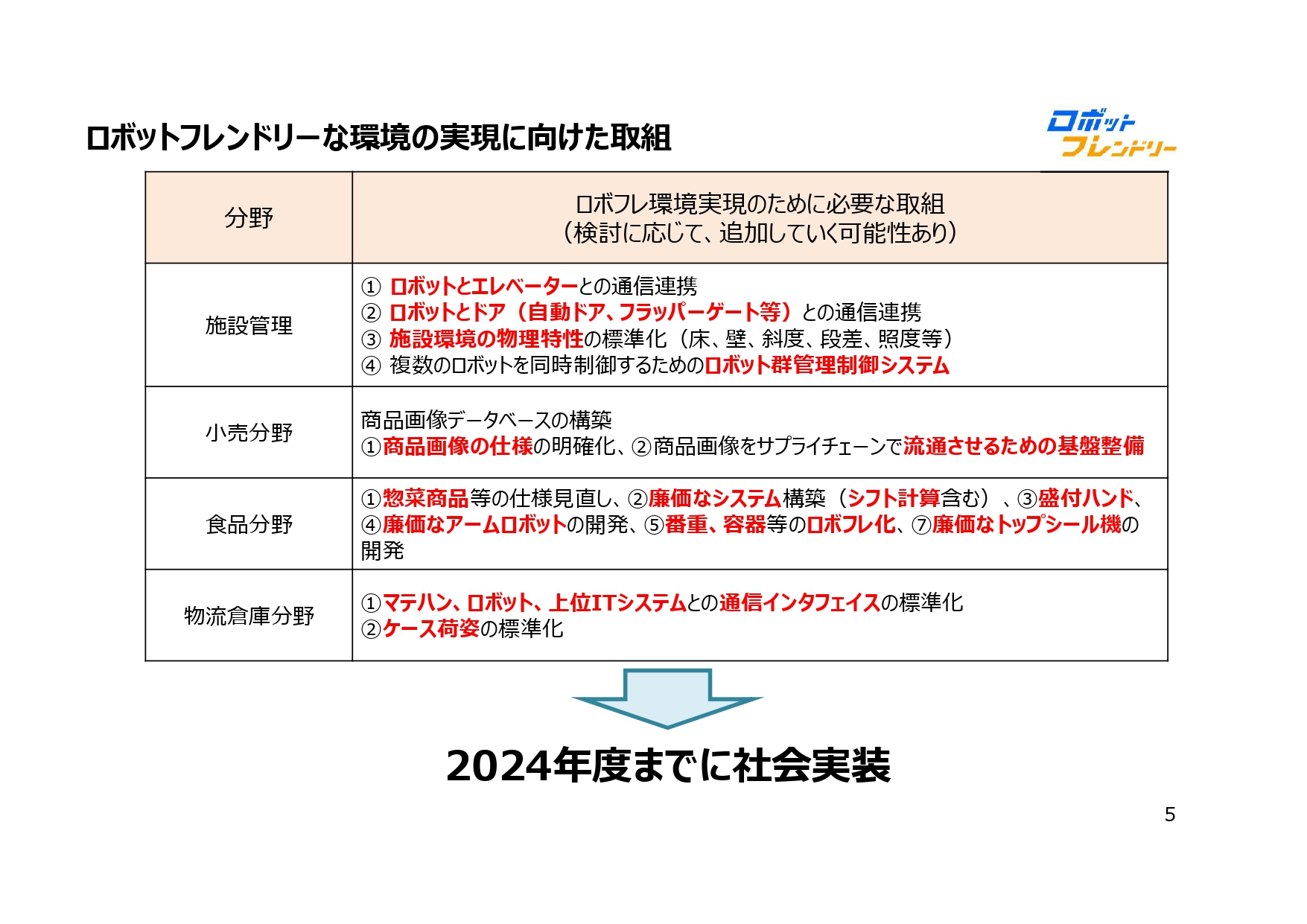
ロボットフレンドリーな環境を実現するための取り組みを、「施設管理」「小売分野」「食品分野」「物流倉庫分野」の各分野ごとに紹介しました。例えば、施設管理については、ロボットとエレベーターや自動ドアなどとの通信連携、施設環境の床や壁、段差などの物理特性の標準化が求められます。また、物流倉庫分野については、マテリアルハンドリング機器やロボットと、上位ITシステムとの通信インターフェイスの標準化やケース仕様の標準化が重要になります。
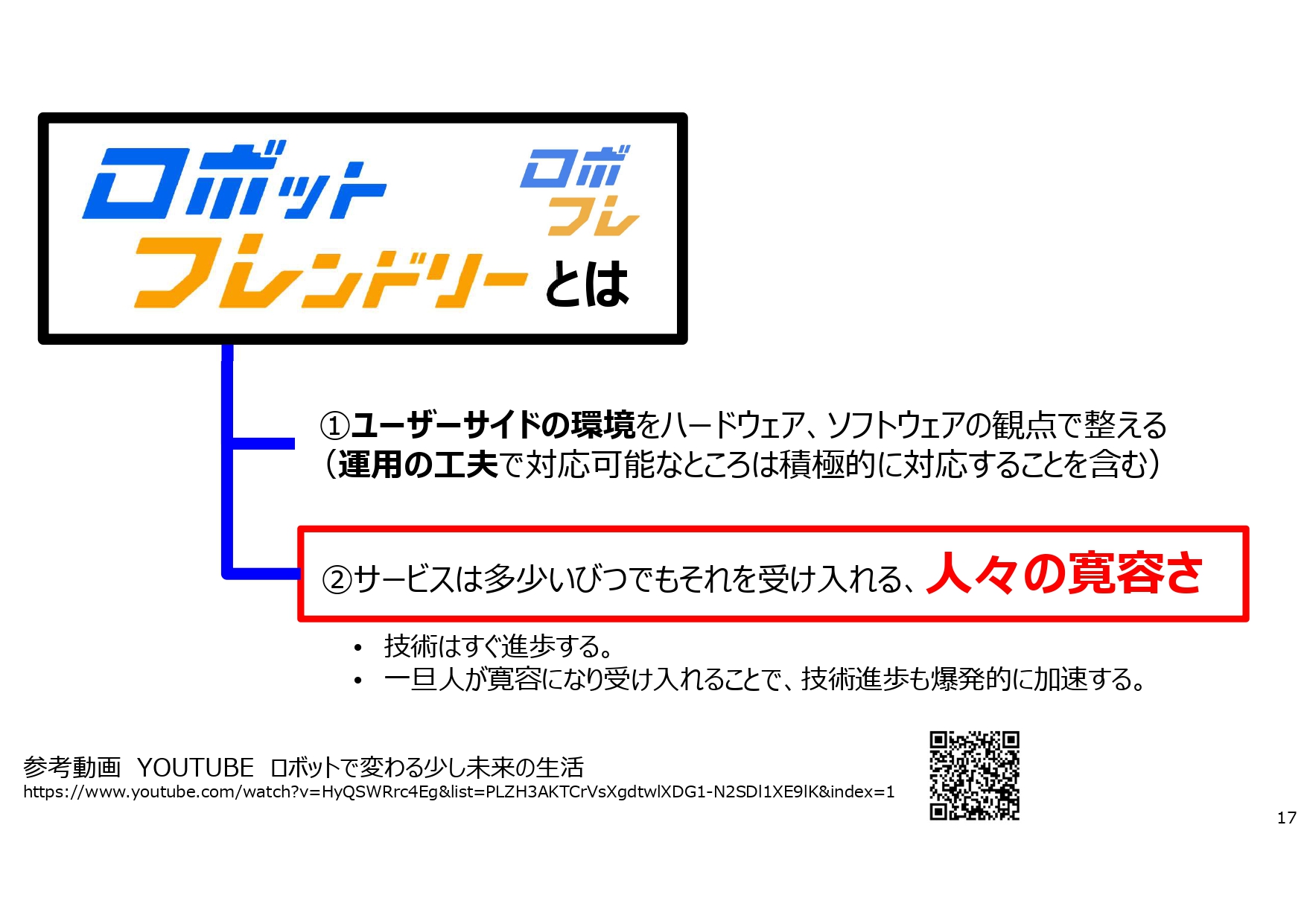
まとめとして、ロボットフレンドリーとは、「ユーザーサイドの環境をハードウェアとソフトウェアの観点で整える」ことと「サービスは多少いびつでもそれを受け入れる、人々の寛容さ」の2つのポイントによって実現されるものであり、特に人々の寛容さが重要だと説明しました。
最後に、福島に整備された福島ロボットテストフィールドの概要を紹介しました。福島ロボットテストフィールドは、陸・海・空のフィールドロボットの開発実証拠点で、さまざまなロボット開発に利用されています。SAITAMAロボティクスセンター(仮称)も新たなソリューションの開発や地域活性、導入促進につながる施設になると期待している、と締めくくりました。

フィールドロボットの現在地とその課題
2つめの基調講演は、「将来のロボット産業におけるフィールドロボットへの期待」というタイトルで、日本ロボット学会前会長で、株式会社IHI技術開発本部技監の村上弘記氏によって行われました。

日本ロボット学会前会長、株式会社IHI技術開発本部技監の村上弘記氏
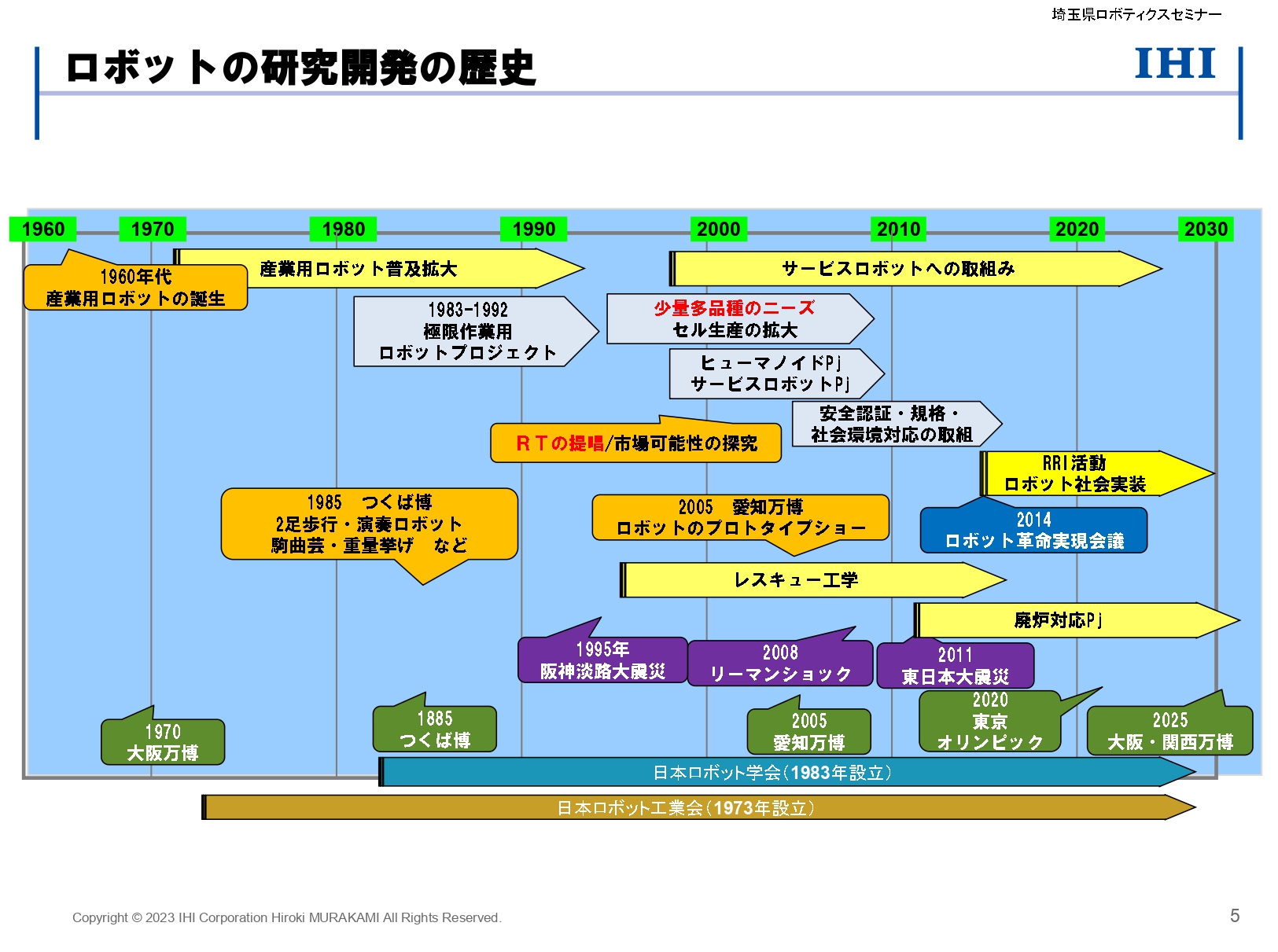
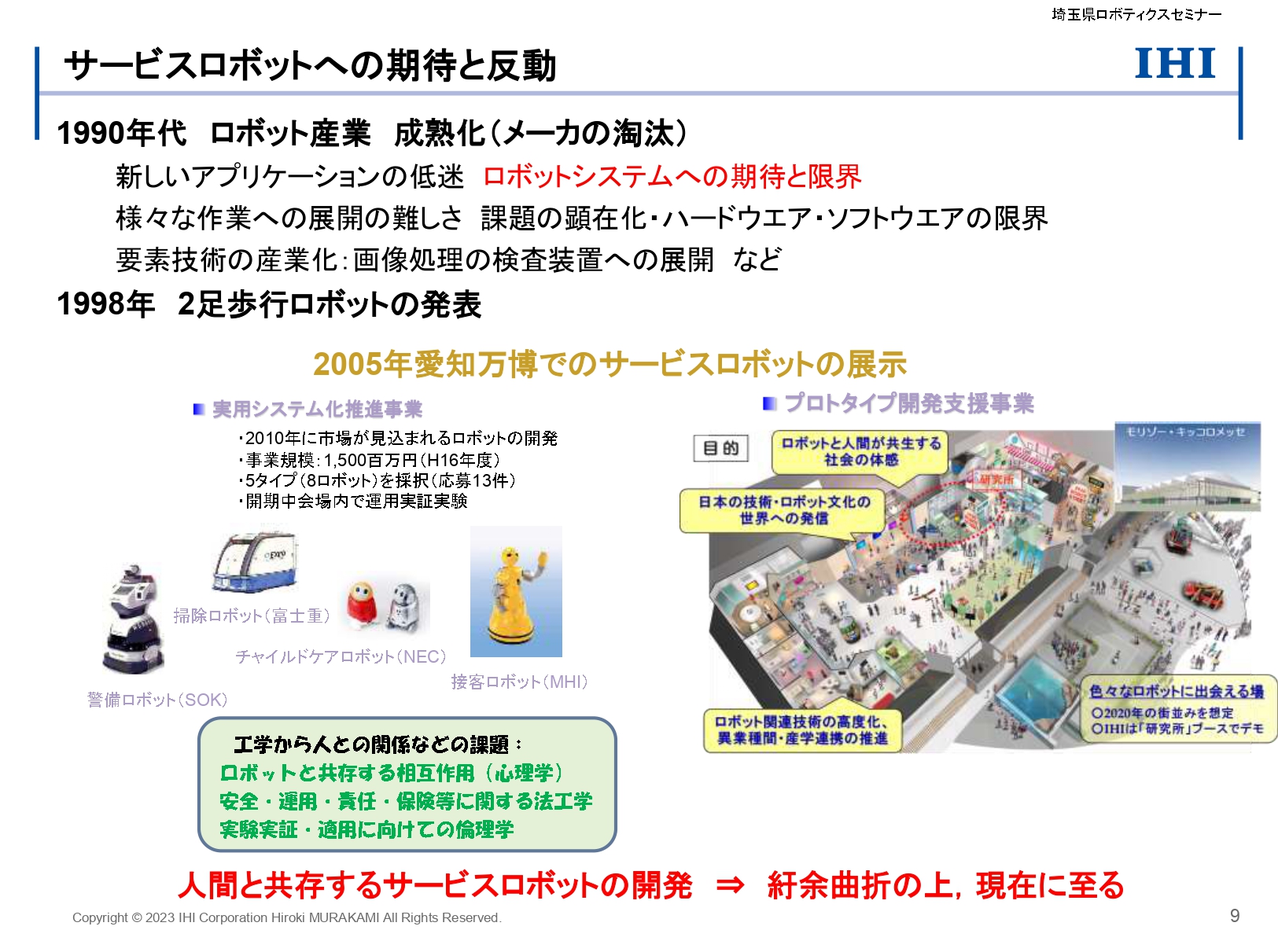
村上氏はまず、日本のロボットの研究開発の歴史を解説しました。1960年代に産業用ロボットが誕生し、1970年代から1990年代にかけて産業用ロボットが普及拡大、2000年代からサービスロボットへの取組が始まりました。しかし、サービスロボットは、期待とその反動も大きく、なかなか普及にはいたっていません。
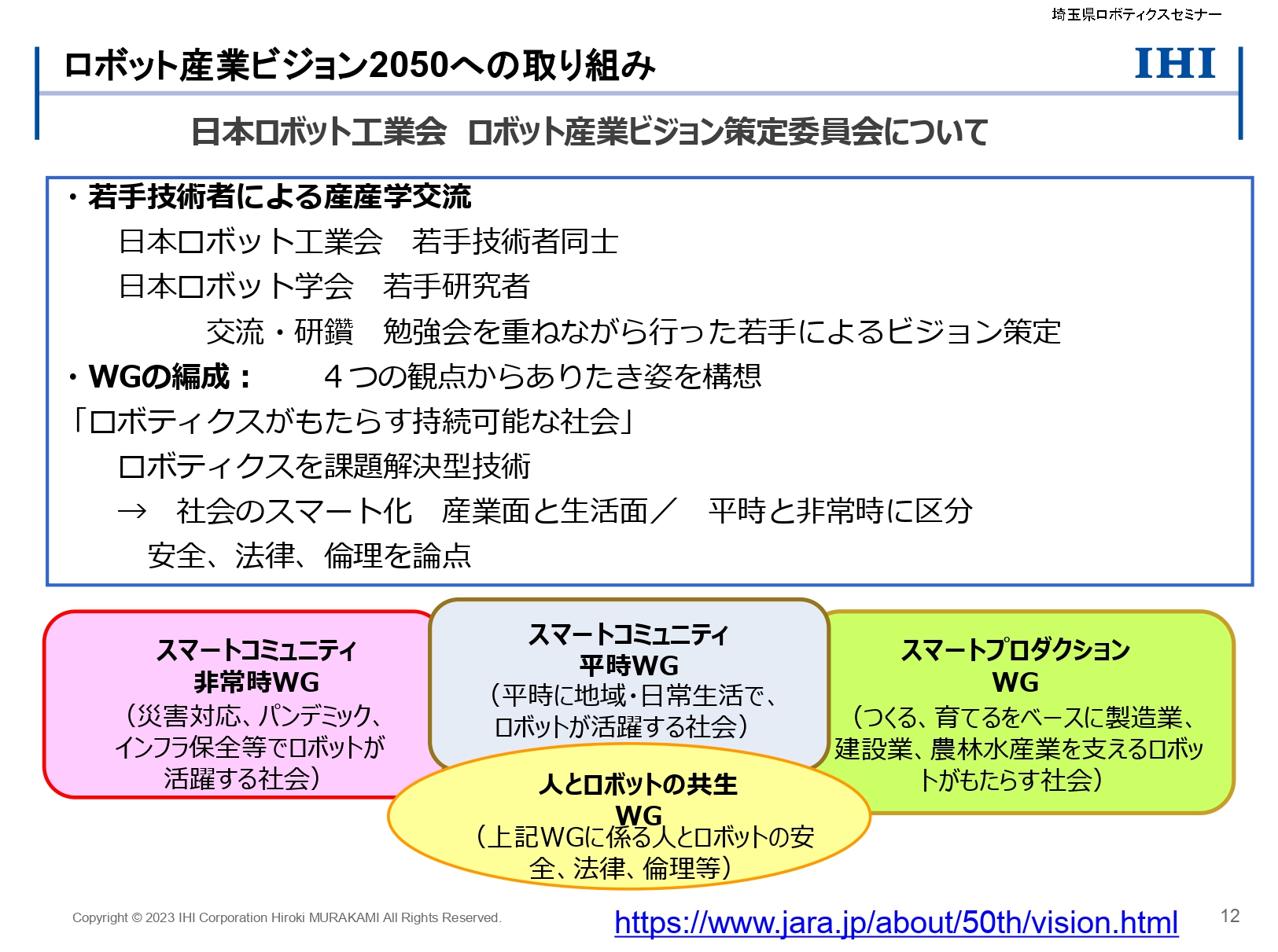
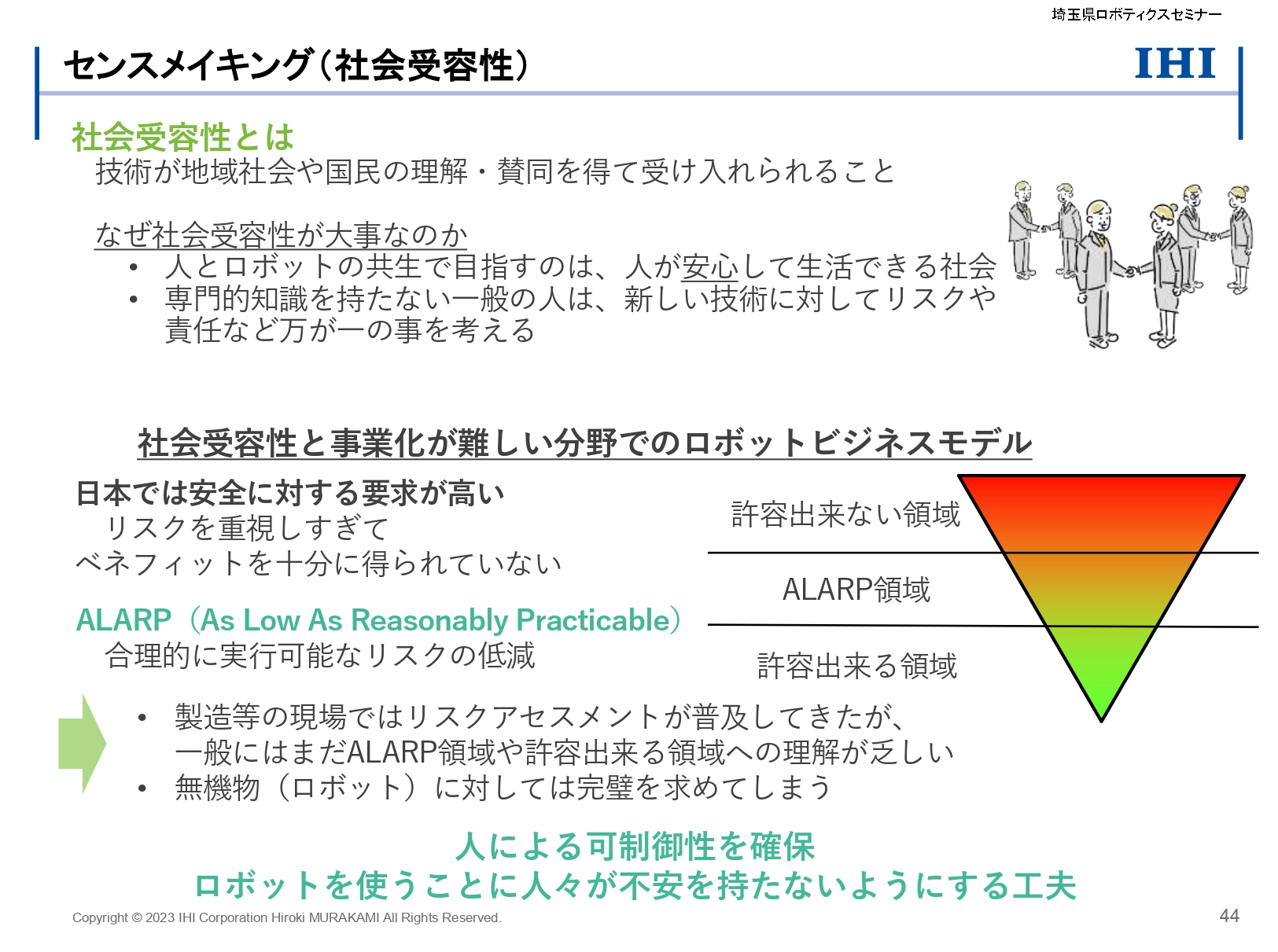
村上氏は、日本ロボット工業会のロボット産業ビジョン策定委員会副委員長でもあり、同委員会が策定中のロボット産業ビジョン2050への取り組みについて説明しました。ロボット産業ビジョン策定委員会は、「スマートコミュニティ非常時WG」「スマートコミュニティ平時WG」「スマートプロダクションWG」「人とロボットの共生WG」という4つのワーキングループ(WG)から構成され、少子高齢化やインフラ老朽化などの社会課題をロボット技術で解決するためのビジョンを策定しています。中でも重要になるのが、人とロボットの共生で、日本では安全に対する要求が高く、リスクを重視しすぎるという問題があると村上氏は指摘しました。人による可制御性を確保し、ロボットを使うことに人々が不安を持たないようにする工夫が大切になります。
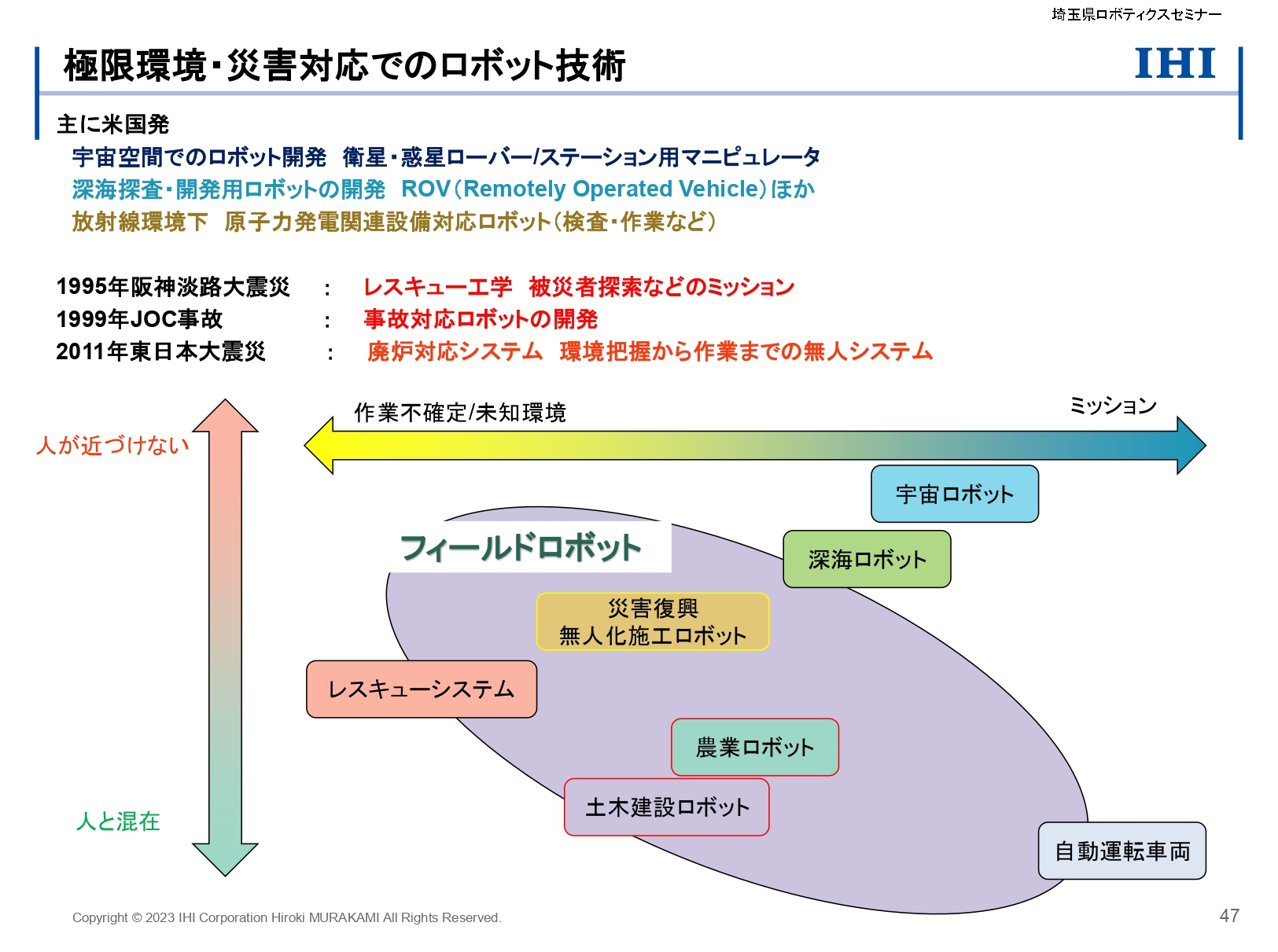
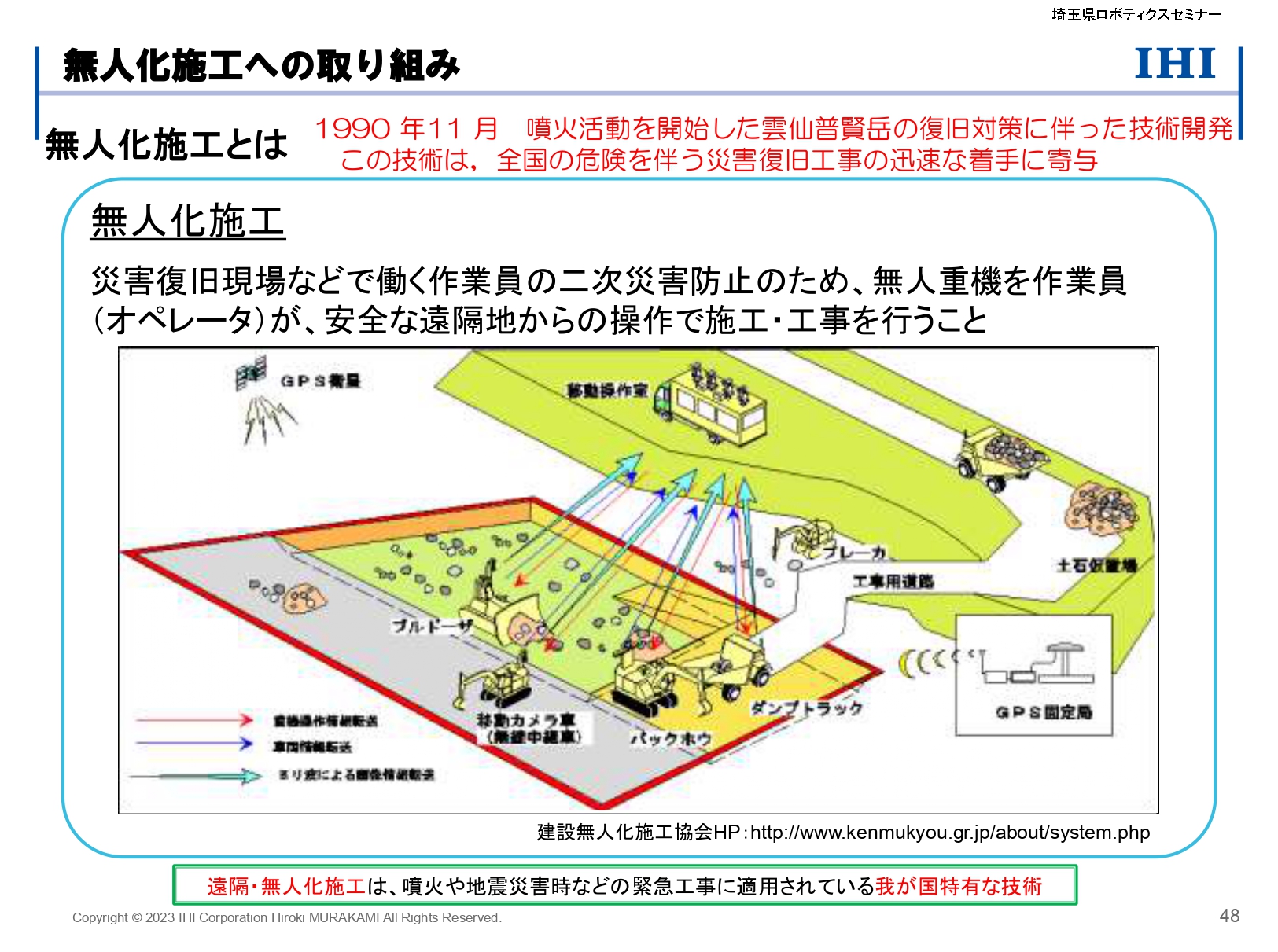
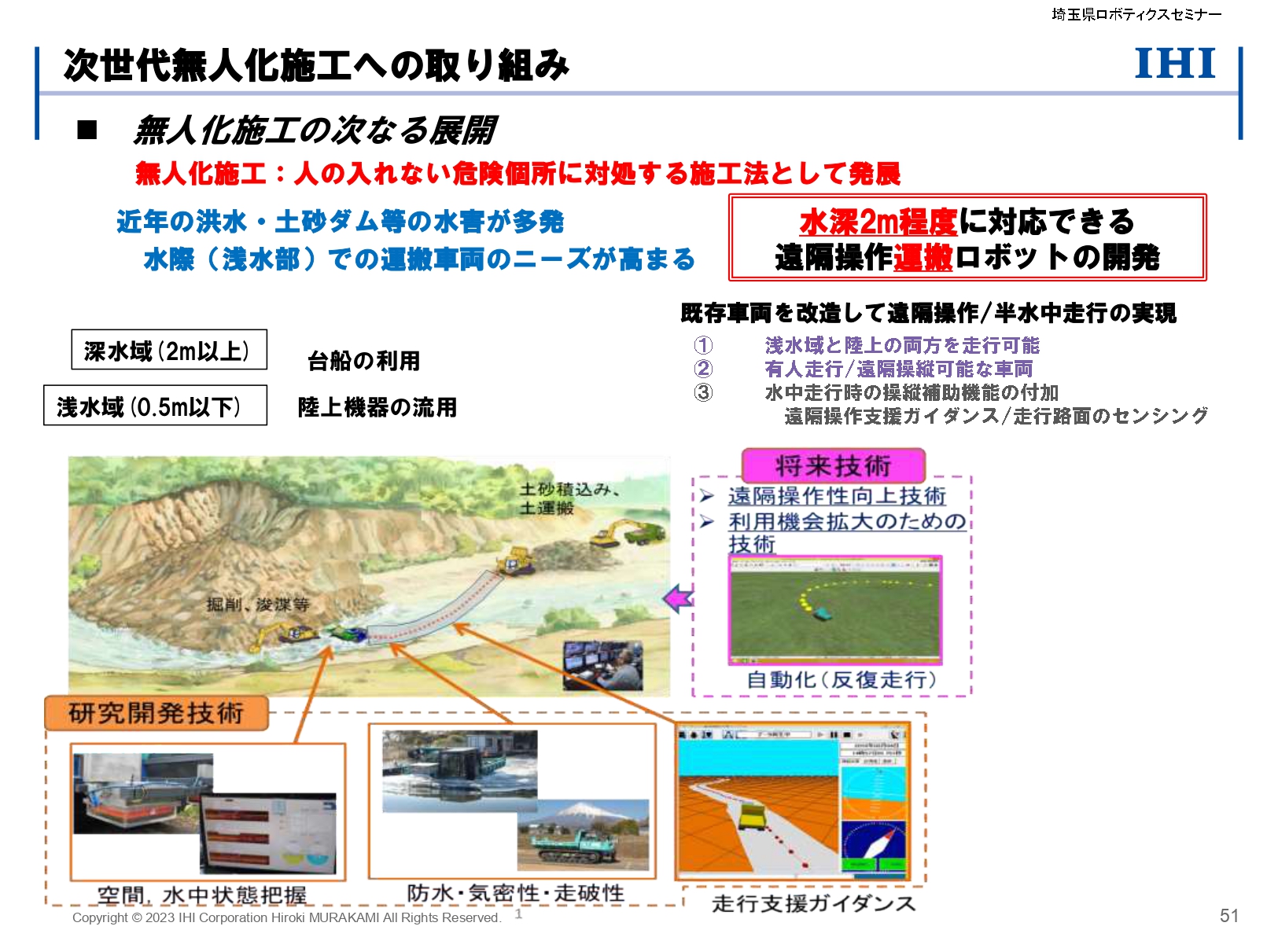
フィールドロボットについては、阪神淡路大震災やJOC事故、東日本大震災などの災害を受け、極限環境・災害対応ロボット技術の研究開発が進みました。また、1990年11月に噴火活動を開始した雲仙普賢岳の復旧対策に伴い、無人重機をオペレータが遠隔操作する無人化施工への取り組みが本格化しました。近年は洪水や土砂ダムなどの水害が多発しており、水際での運搬車両のニーズが高まっています。そこで無人化施工の次の展開として、水深2m程度に対応できる遠隔操作運搬ロボットの開発が進められているとのことです。
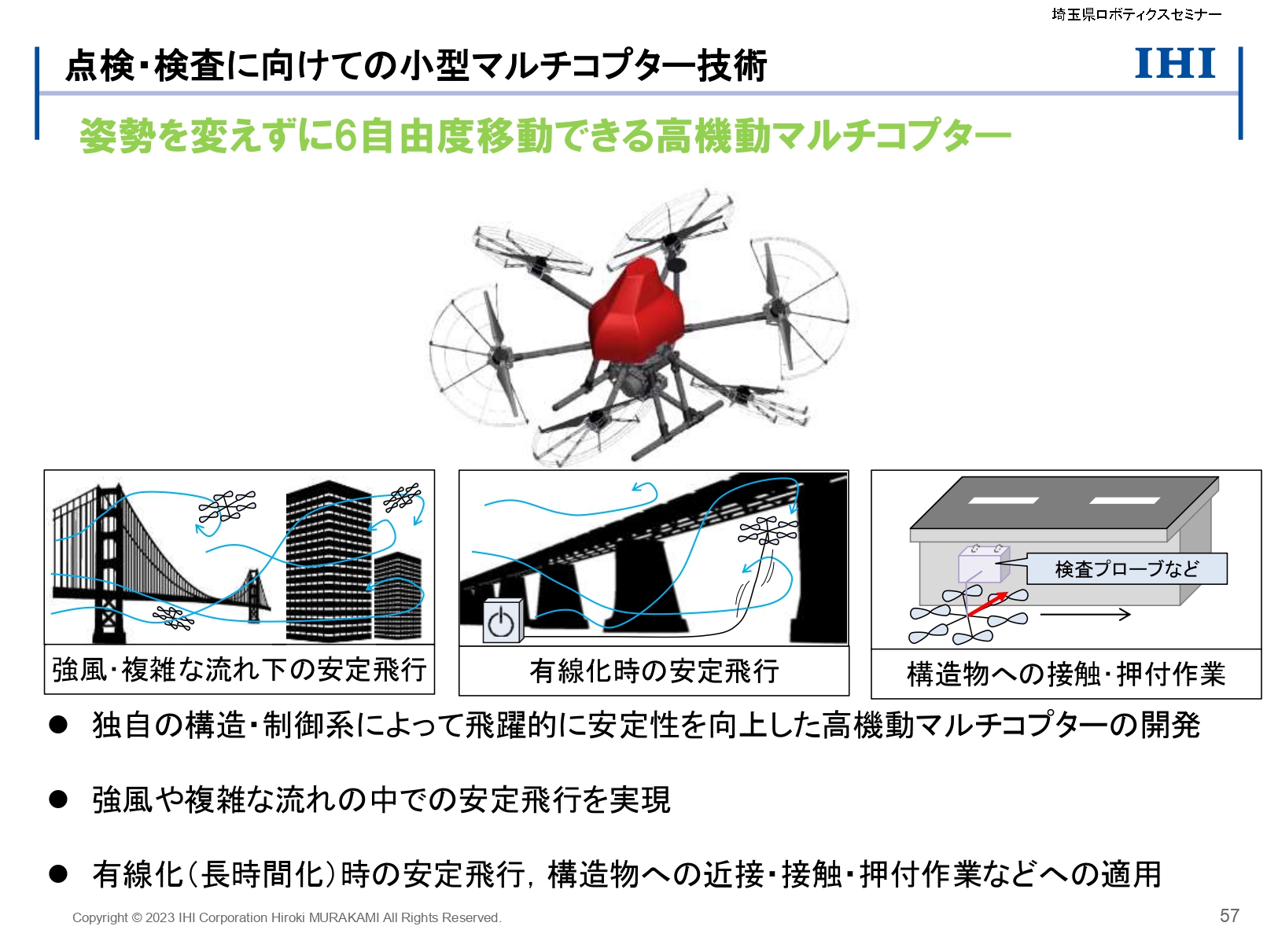
また、小型無人航空機(ドローン)は、150kg未満の小型無人機と150kg以上の大型無人航空機に大別されますが、前者は空撮・測量・散布や点検・検査、物流への展開が、後者は空飛ぶ車として、旅客・人流への展開が期待されています。点検・検査向けでは、姿勢を変えずに6自由度の移動が可能な高機動マルチコプターが開発されており、乱流下でも安定した飛行を実現しています。
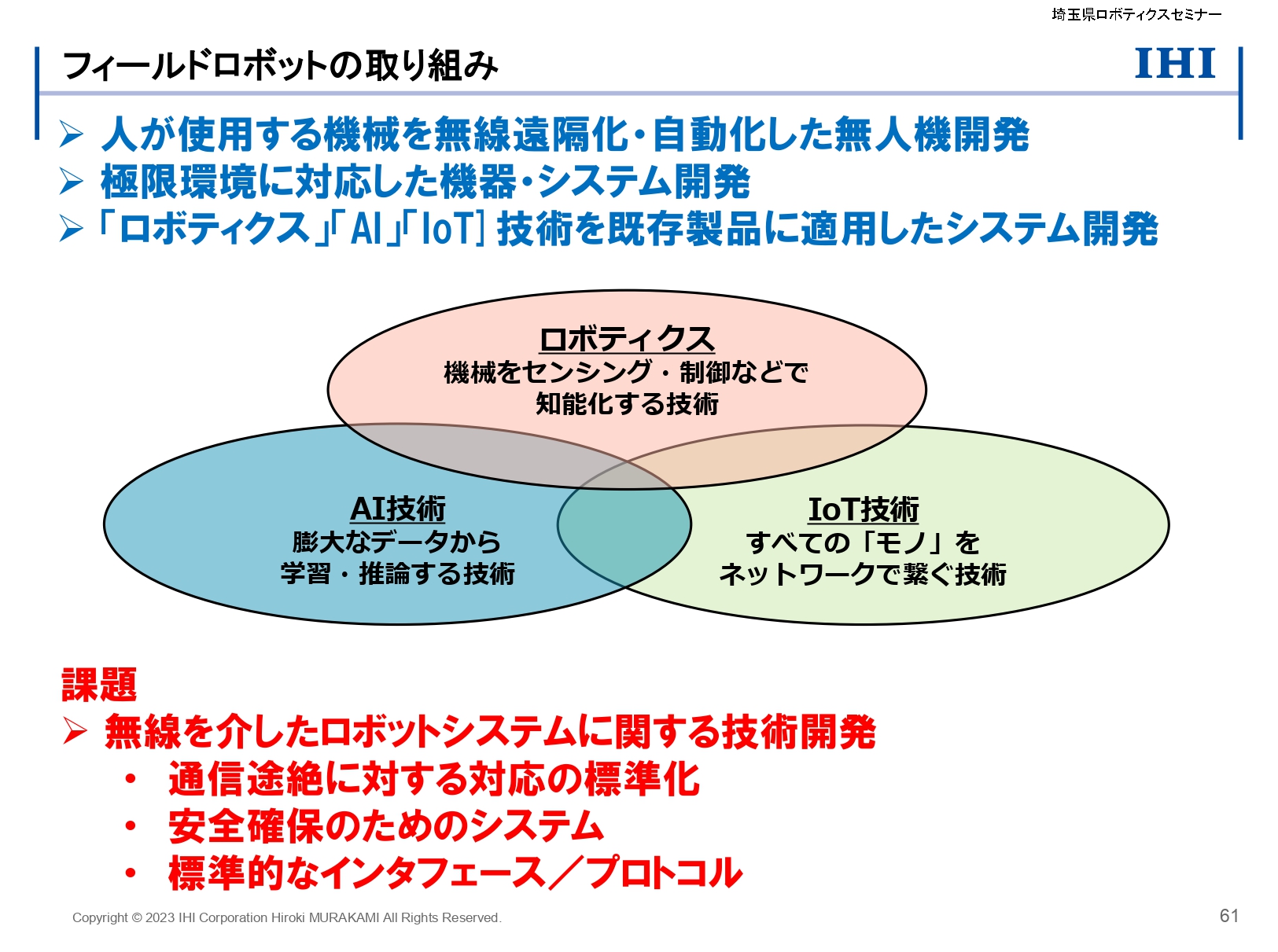
フィールドロボットの今後の取り組みの方向性としては、「人が使用する機械を無線遠隔化・自動化した無人機開発」「極限環境に対応した機器・システム開発」「『ロボティクス』『AI』『IoT』技術を既存製品に適用したシステム開発」の3つが挙げられ、その課題となるのが、無線を介したロボットシステムに関する技術開発になるとのことです。
ロボットによる「農業のアウトソーシング」という形
続いて、農業ロボットの開発事例を株式会社レグミン 代表取締役の成勢卓裕氏が農業ロボットの開発事例に関するプレゼンを行いました。

株式会社レグミン 代表取締役の成勢卓裕氏
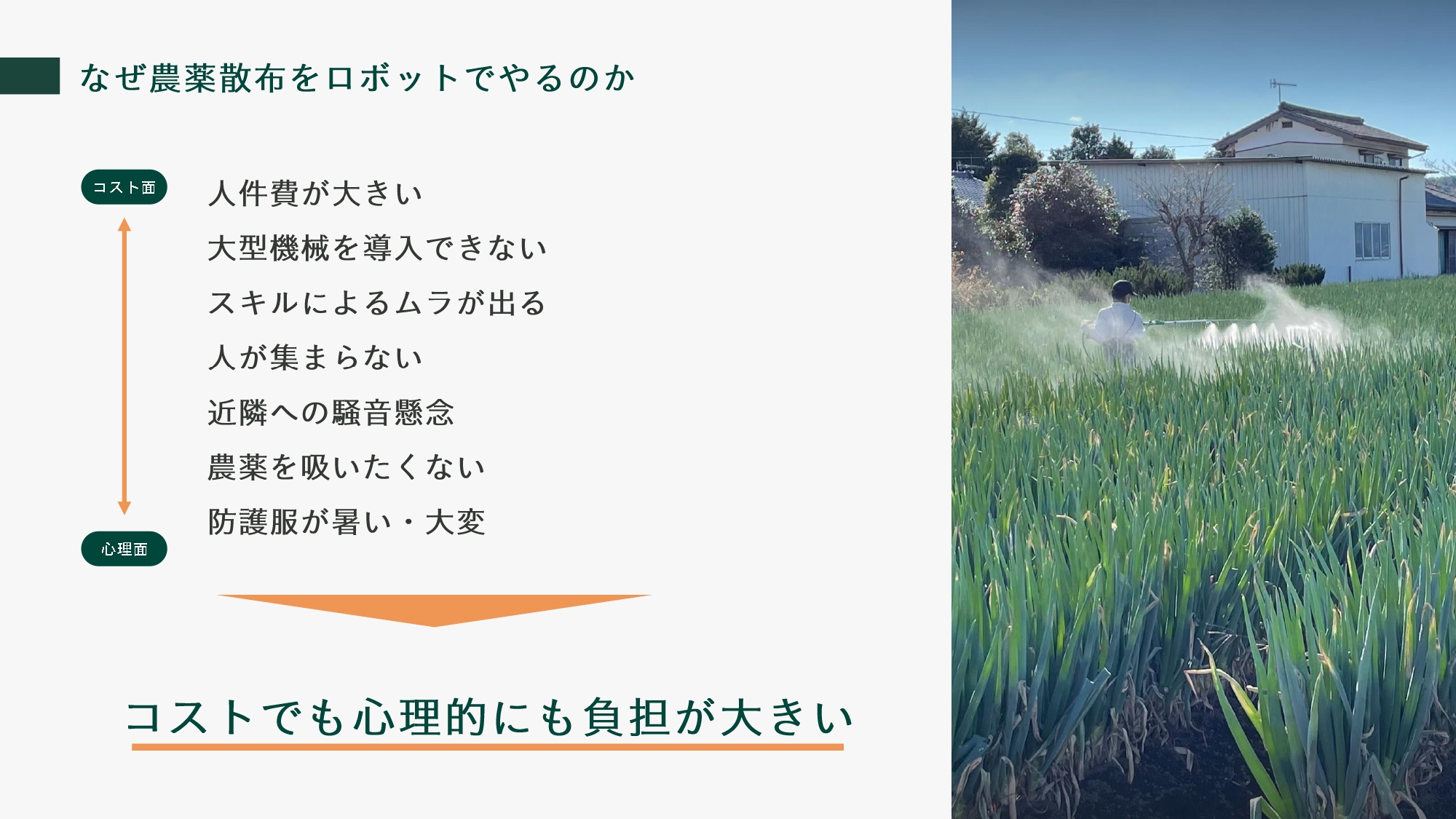
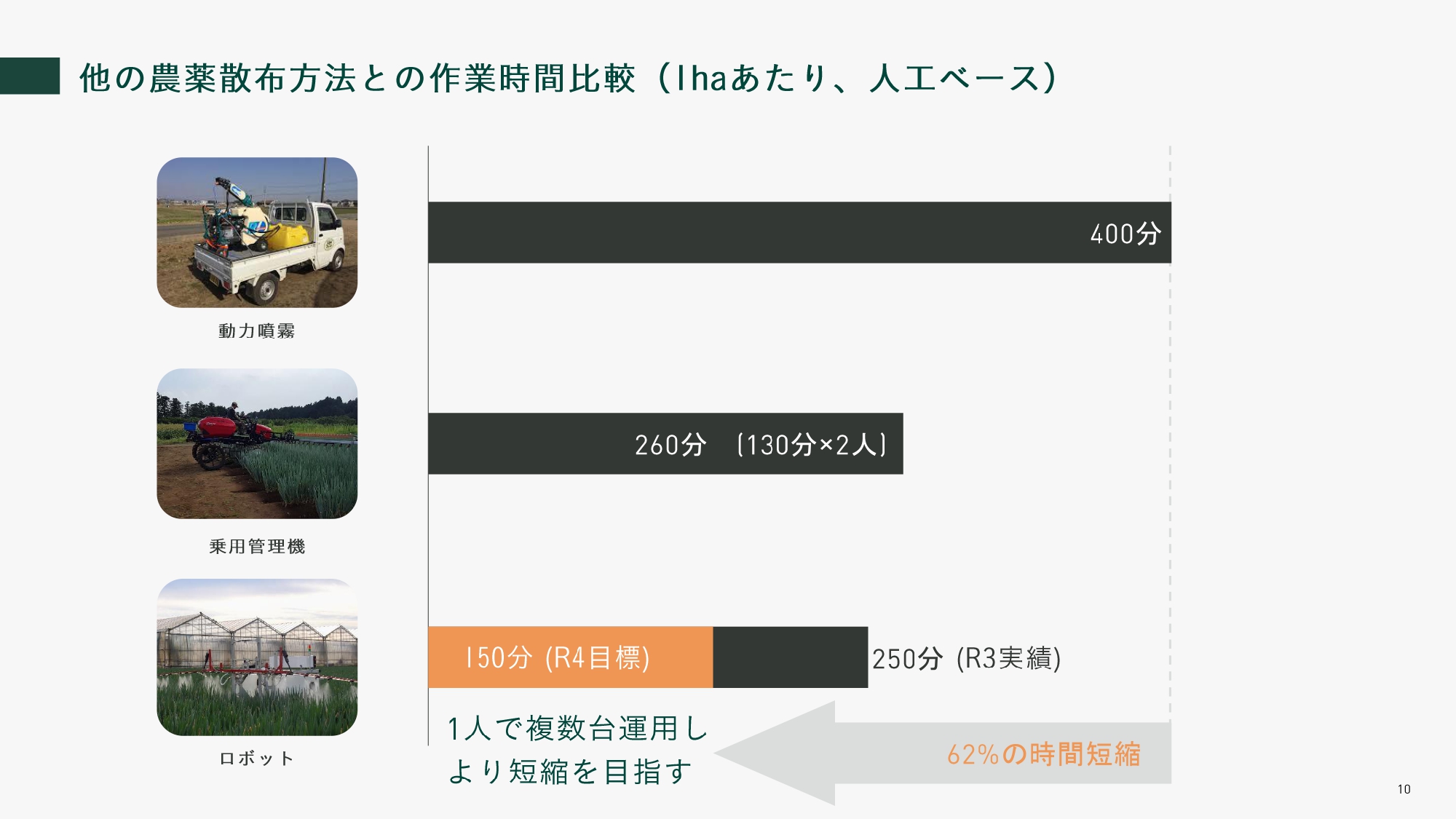
レグミンは、2018年に創業されたロボットベンチャーで、自律走行型の農薬散布ロボットを開発しています。活動拠点は埼玉県深谷市でサービスのプロトタイプの提供を複数の農家で行っています。農薬散布は、農家にとってコスト的にも心理的にも負担が大きい作業であり、ロボット化することでその負担を軽減できればと考え、起業したそうです。同社のビジネスモデルは農家から作業依頼を受け、農薬散布を代わりに行い代金を請求するという、いわば農薬散布のアウトソーシングを行う形です。従来の農薬散布方法に比べて、作業時間も短く済むことが実証されていますが、今後は1人で複数台のロボットを運用し、作業時間のさらなる短縮を目指すとのことです。

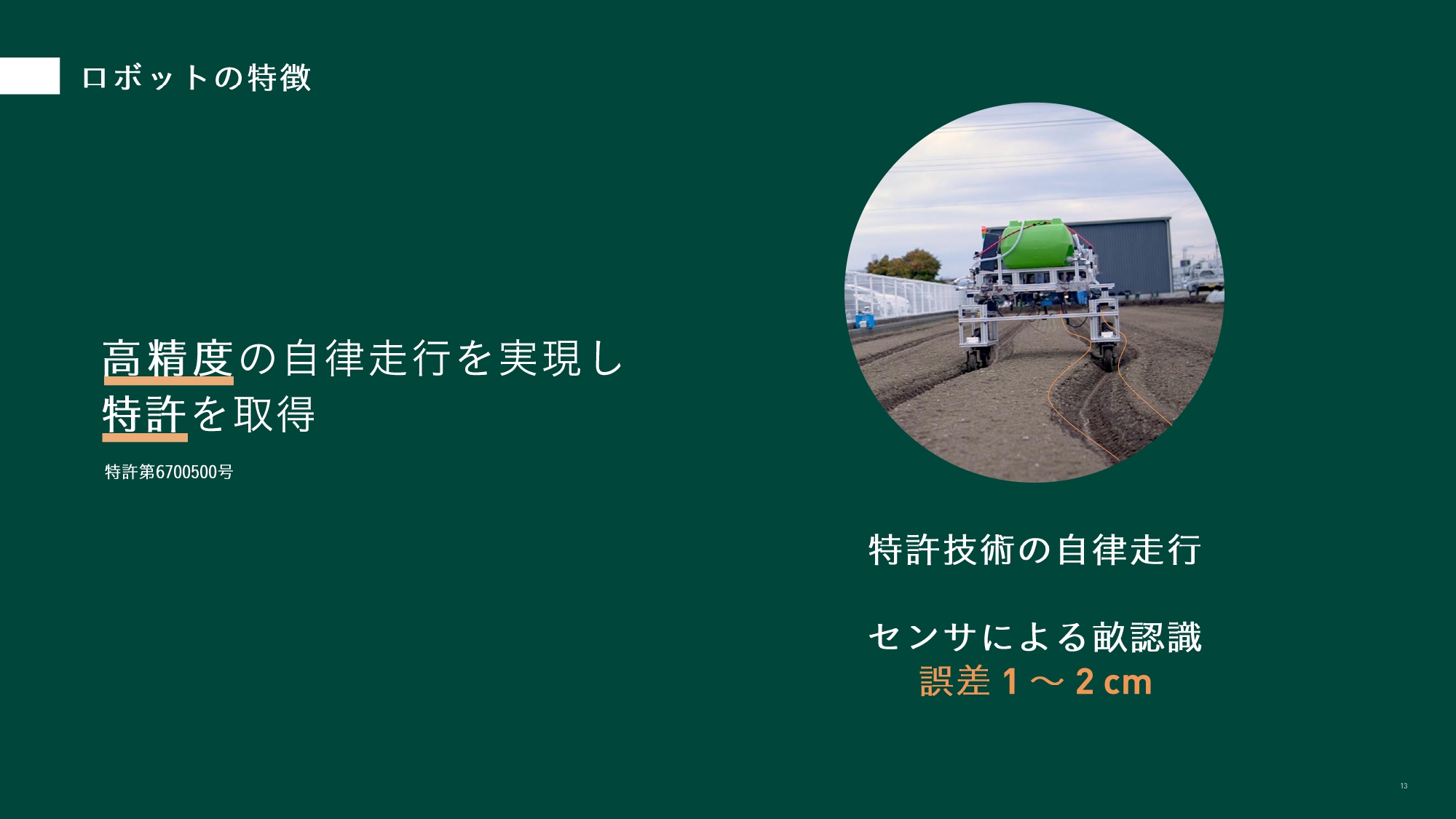
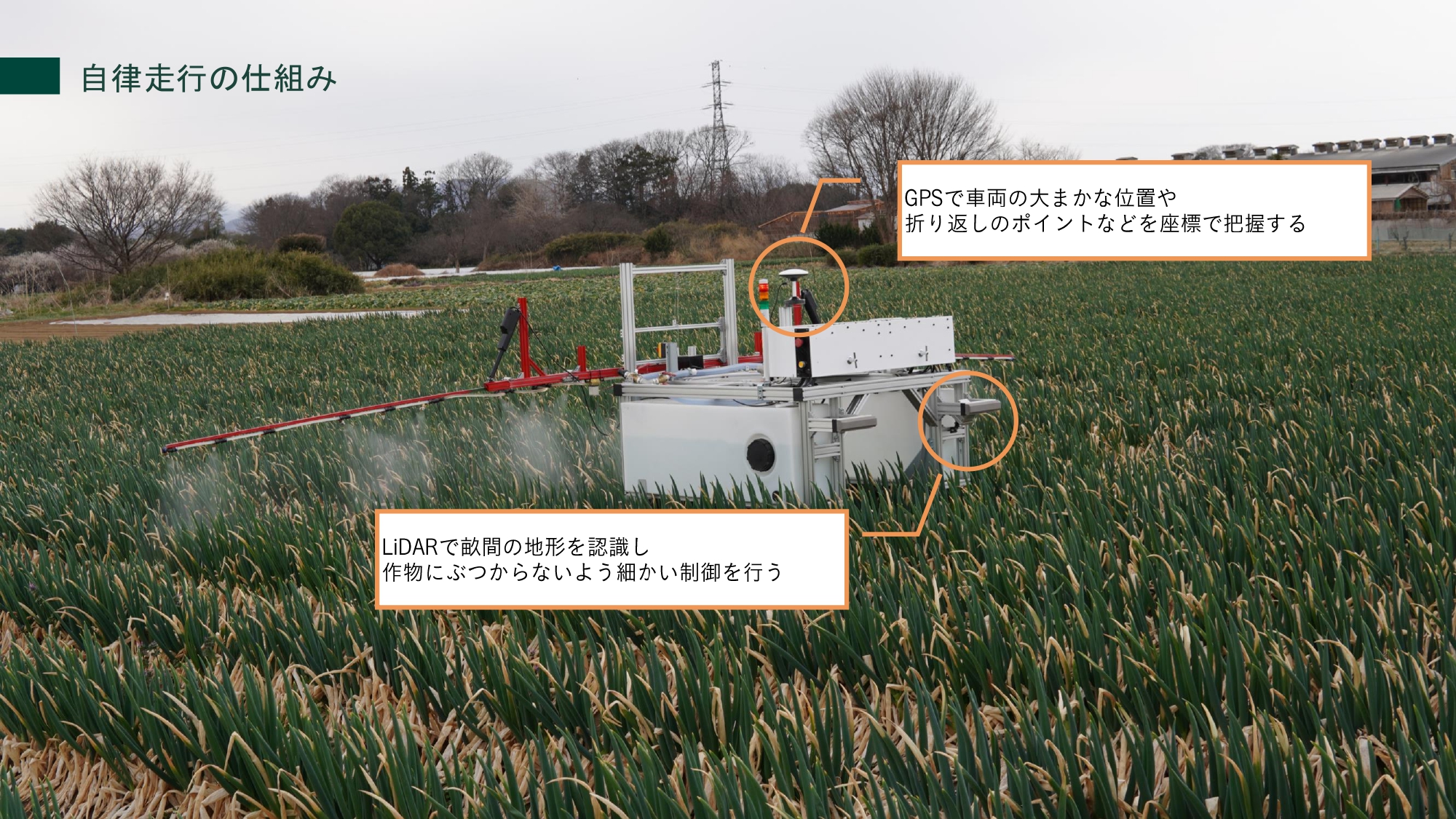
レグミンのロボットの特長は、センサによって畝を認識し、誤差1~2cmという高精度の自律走行を実現したことにあります。この自律走行技術は特許を取得しています。GPSによってロボットの大まかな位置や折り返しポイントなどを把握し、LiDARで畝の間の地形を認識し、作物にぶつからないように細かい制御を行っています。
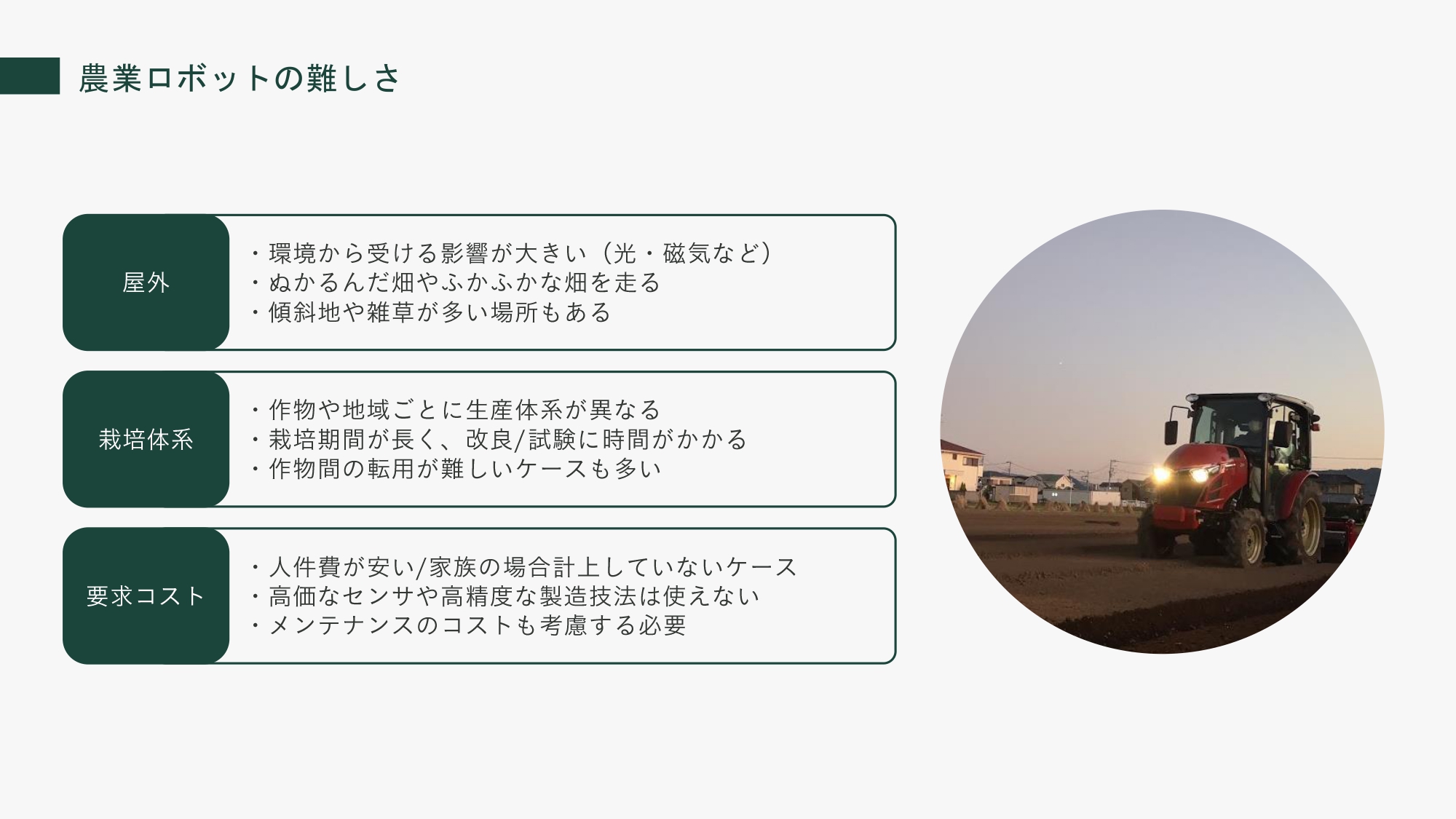
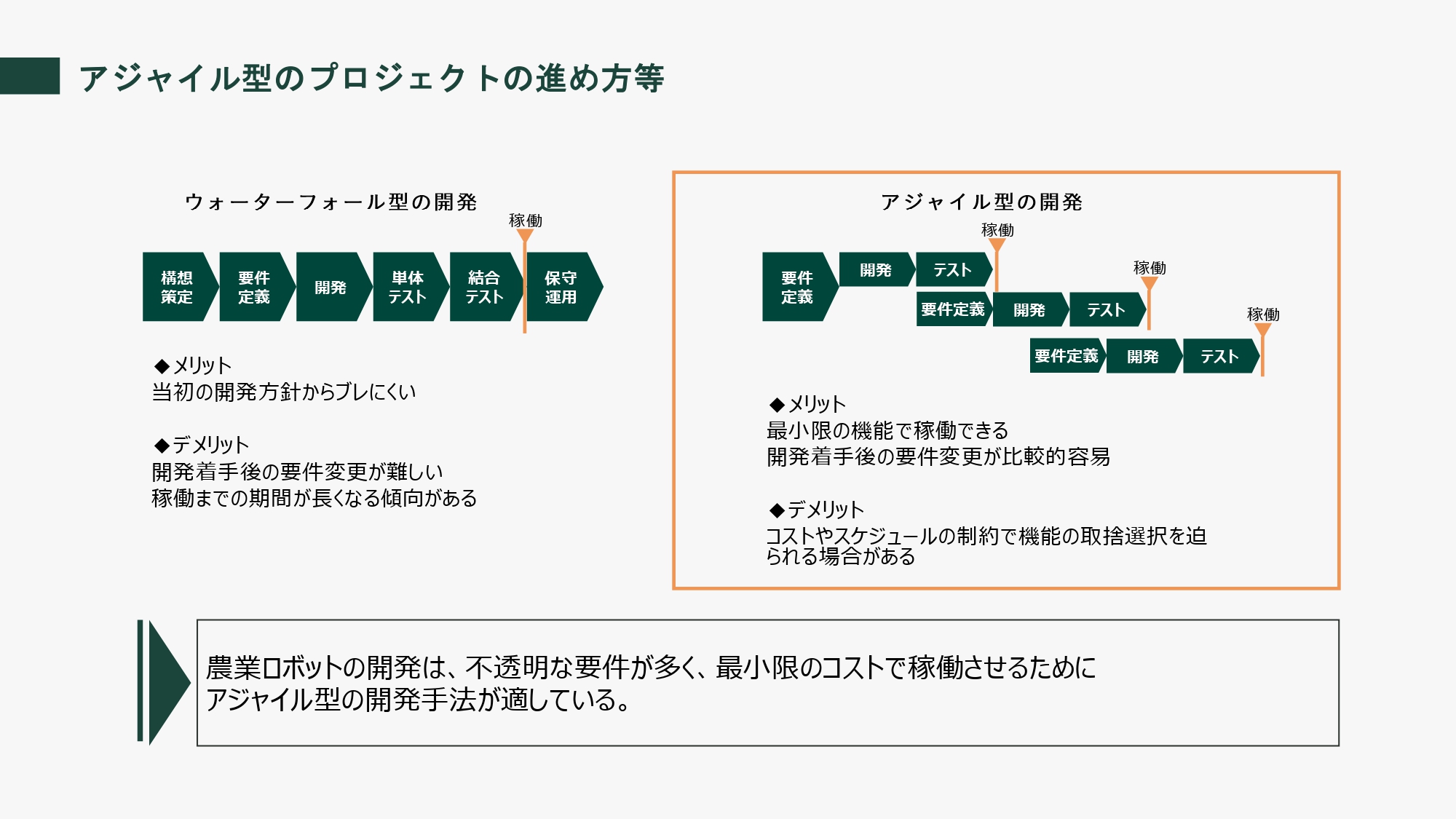
成勢氏は、農業ロボットの難しさとして、屋外で動くロボットなので環境から受ける影響が大きいこと、ぬかるんだ畑や傾斜地もあること、作物や地域ごとに生産体系が異なり、栽培期間が長く改良や試験に時間がかかること、そして要求コストが厳しいことを挙げました。農業ロボットの開発は、不透明な要件が多いため、アジャイル型の開発手法が適しており、そのためにはチームですべてを賄える内製化が重要だと語りました。
また、レグミンは、2021年からクボタ社と共同でハウス栽培のスマート化の実証実験を開始しています。今後は、深谷市以外の地域にもサービスを提供していきたいとのことです。

必要なのは販売まで含めた社会実装のイメージ、ロボットの設計開発がゴールではない
2つめの事例紹介は、「学のサイドからの産学官連携による開発支援+社会実装支援」というタイトルで、埼玉大学大学院理工学研究科の琴坂信哉准教授によって行われました。
埼玉大学大学院理工学研究科の琴坂信哉准教授
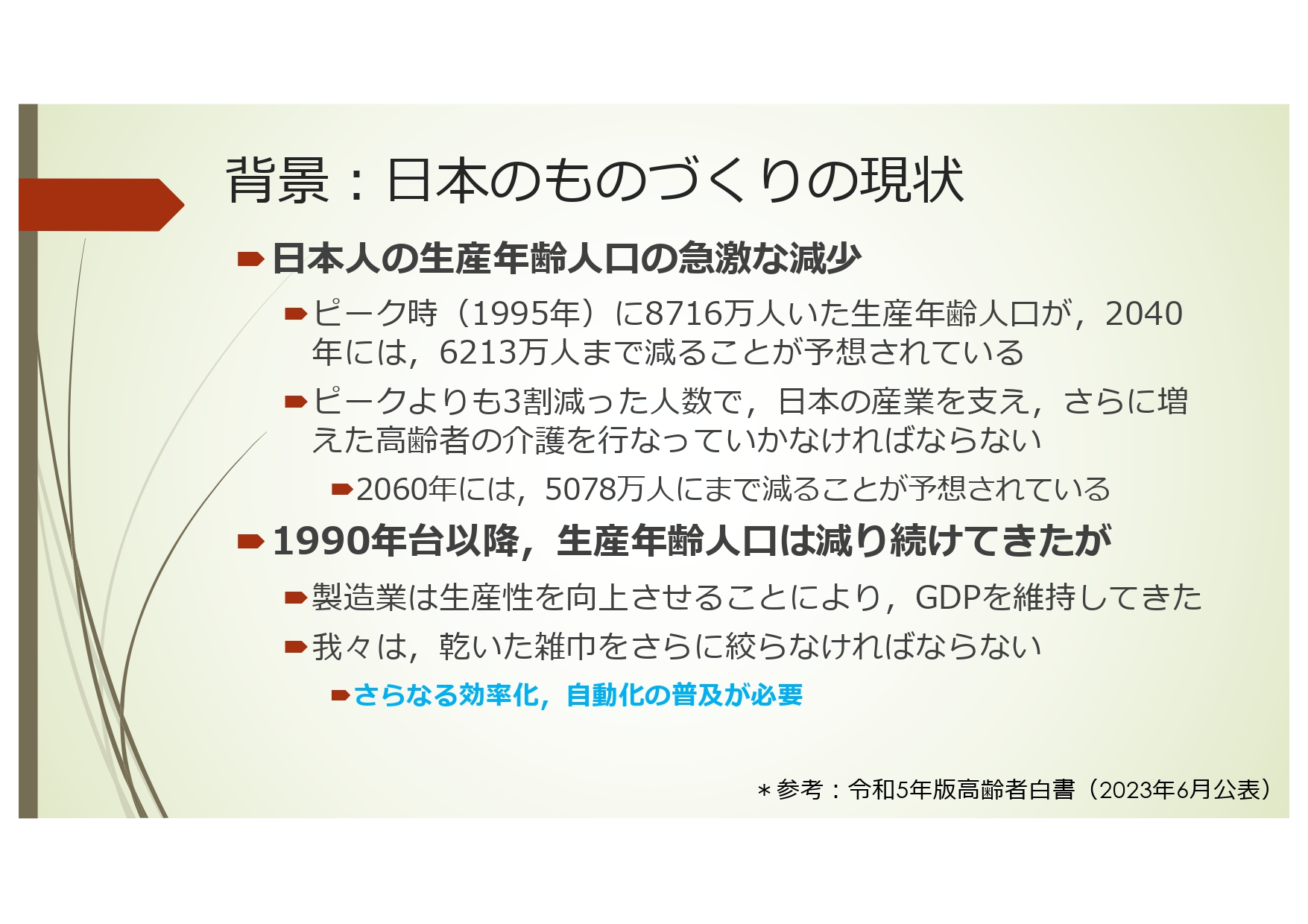
琴坂准教授はまず、日本のものづくりの現状について、生産年齢人口が急激に減少しているため、GDPを維持するにはさらなる効率化、自動化の普及が必要だと指摘しました。そのためには、「官・学」連携による産業支援、技術開発支援はもちろん、周辺環境の整備や中立的な助言が重要になります。また、NEDOも「NEDOロボットアクションプラン」を2023年4月末に公表し、社会課題解決に向けてロボット活用を推進するための大局的な方向性を提起しています。
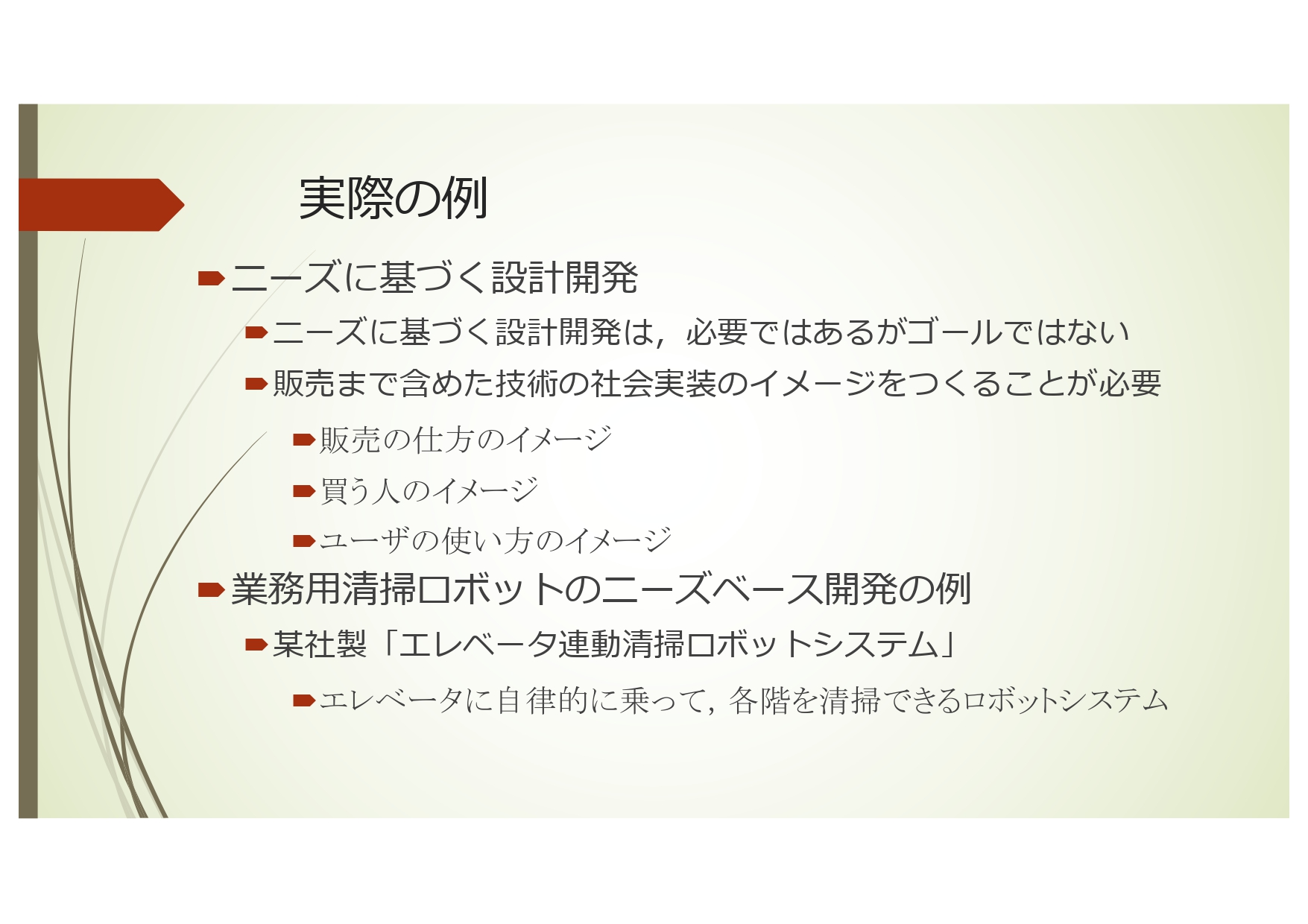
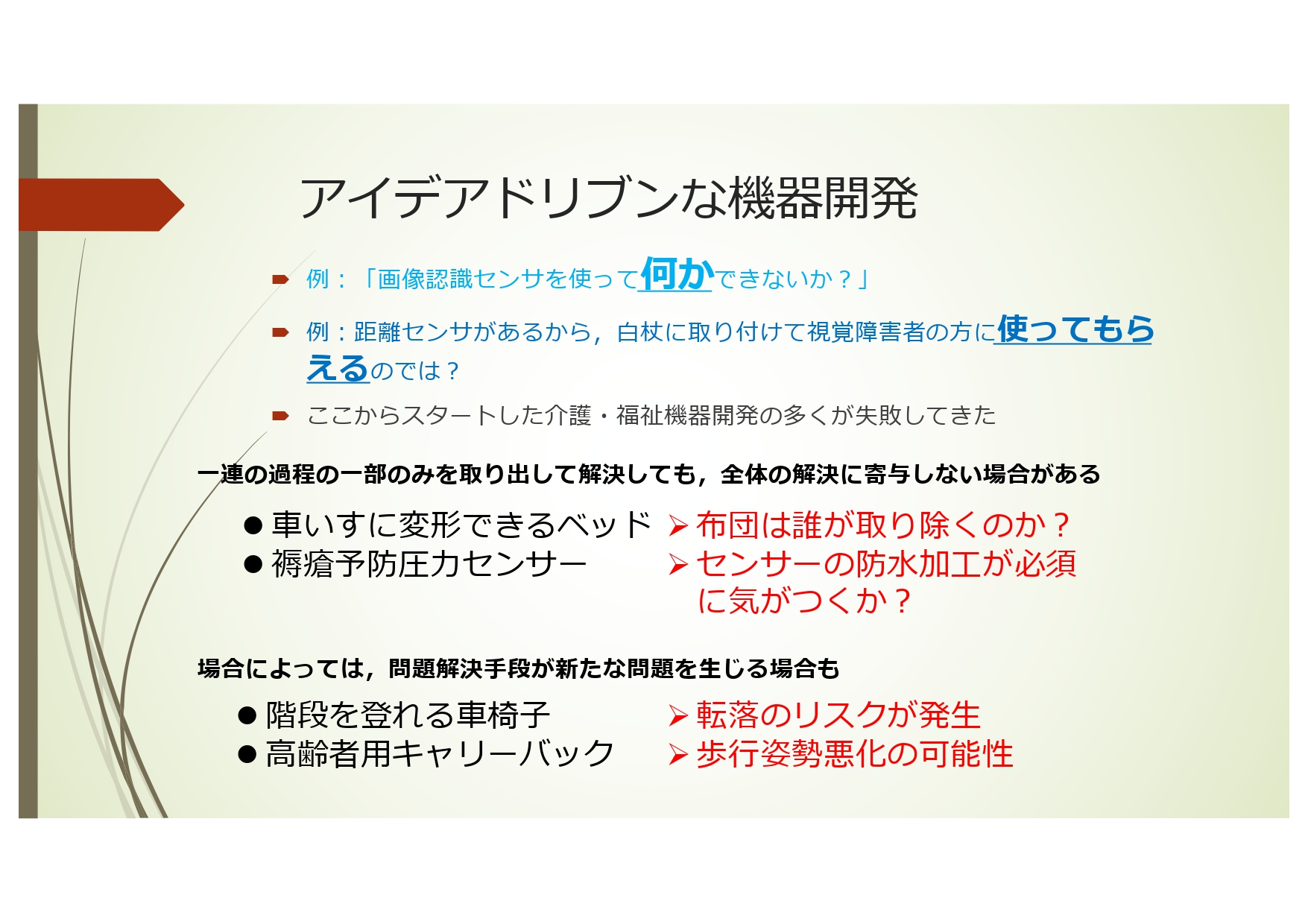
ロボットは基本的にニーズに基づいて開発されてきました。例えば、経済産業省と厚生労働省が、介護ロボット開発の促進事業や補助金制度などを実施したところ、自らの技術を介護ロボット開発に活用しようとする企業が多数応募しましたが、その結果介護ロボットが普及したかというと、その答えはノーだと、琴坂准教授は説明しました。その原因は、アイデアドリブンな機器開発にあります。例えば、「距離センサがあるから、白杖に取り付ければ視覚障がい者の方に使ってもらえるのでは?」といった、機器開発の仕方です。ここからスタートした介護・福祉機器の多くが失敗しました。ニーズに基づく設計開発は必要だがゴールではなく、販売まで含めた技術の社会実装のイメージをつくることが必要だと琴坂准教授は力説しました。
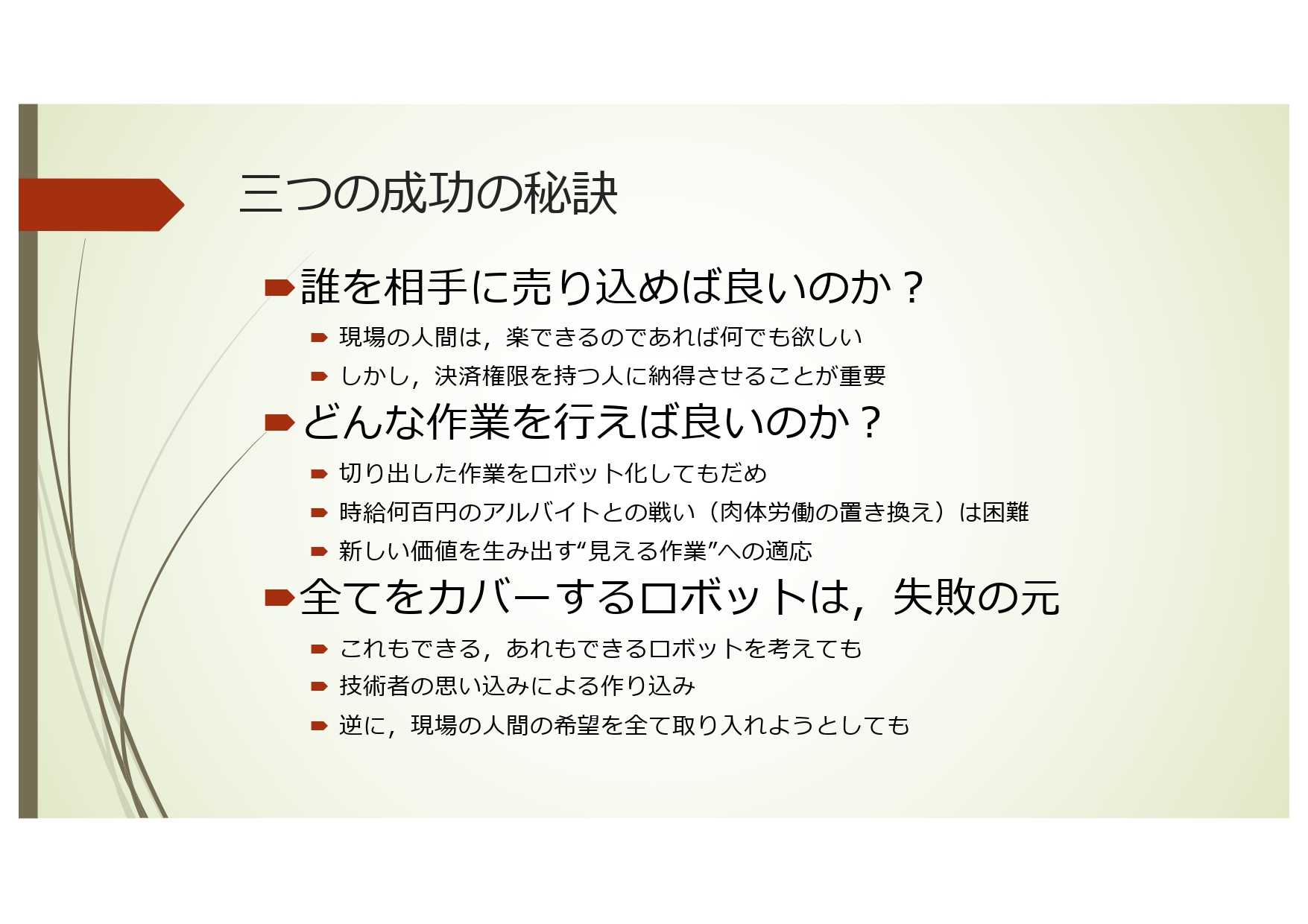
琴坂准教授は、ロボットのニーズベース開発の成功例として、「エレベーター連動清掃ロボットシステム」を挙げました。これはロボットがエレベーターに自律的に乗って、各階を清掃するシステムですが、その成功には3つの秘訣があるといいます。一つめは「誰を相手に売り込めば良いのか?」で、決済権限を持つ人に納得させることが重要になります。二つめは「どんな作業を行えば良いのか?」で、切り出した作業をロボット化してもだめで、新しい価値を生み出す”見える作業”への適応が必要になります。三つめが「全てをカバーするロボットは、失敗の元」ということで、これもできる、あれもできるロボットを考えてもだめで、技術者の思い込みによる作り込みが失敗の元になるということです。